En un avance significativo en la robótica aplicada al deporte, un equipo de investigadores chinos ha desarrollado un sistema que permite a un robot humanoide aprender a jugar al tenis utilizando datos humanos imperfectos. Este logro marca un hito en la capacidad de los robots para aprender y adaptarse en situaciones complejas.
Aprendizaje con datos imperfectos
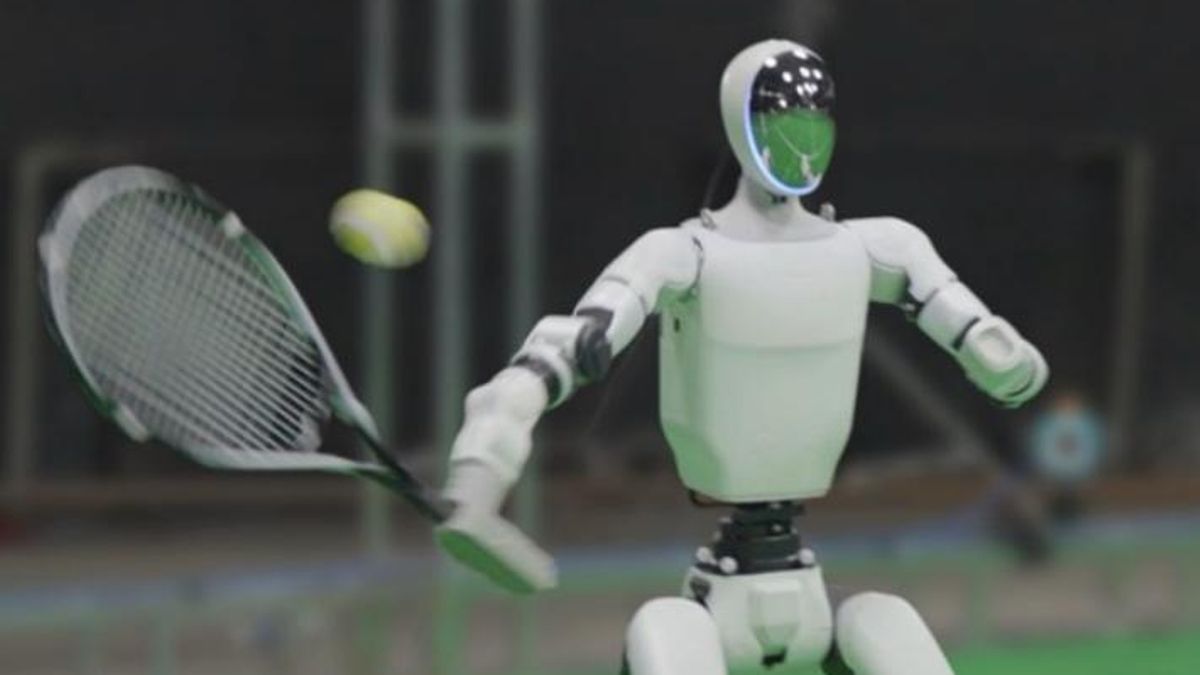
El sistema, denominado LATENT, utiliza un enfoque innovador para enseñar al robot a jugar al tenis. En lugar de requerir registros perfectos de movimientos humanos, LATENT se basa en fragmentos de habilidades simples, como golpes de derecha y de revés, recopilados de jugadores amateurs. Con estos datos, el robot puede aprender a devolver pelotas, enlazar varios golpes seguidos y moverse con naturalidad en la cancha.
Mejoras en la precisión y el rendimiento
Las pruebas realizadas en pista muestran que el robot es capaz de jugar contra personas y mantener intercambios de varios golpes en distintas zonas de la cancha. En comparación con métodos anteriores, el sistema LATENT ha demostrado una mejora significativa en la precisión, el porcentaje de éxito y la naturalidad del movimiento. En su mejor registro, el robot alcanzó un 96,5% de aciertos.
Ventajas y limitaciones
El uso de datos imperfectos reduce la dificultad de recopilar información y abre la puerta a entrenar en contextos donde no existen registros detallados. Sin embargo, el sistema presenta límites claros, como la dependencia de un sistema de captura de movimiento y un modelo de juego simplificado. Los investigadores plantean que la incorporación de visión activa podría mejorar la interacción del robot con su entorno.